I’m an engineer who is focused on building real-world robotic systems that have to work under imperfect sensing, limited computation, and non-ideal hardware.
My interests center on control and autonomy problems where theory has to meet physical constraints, and design decisions matter.
I enjoy working across mechanical design, electronics, and software to take ideas from concept to real-world operation.
University of California, Santa Cruz
M.S. Electrical Engineering — Robotics & Control (Dec 2025) · GPA: 3.80
B.S. Robotics Engineering, Minor in Electrical Engineering · GPA: 3.65
Experience Overview
My experience spans across autonomous robotics, UAV simulation, and hands-on mechatronic
system design across coursework, competitions, and research projects. I’ve worked on
full-system development for autonomous robots, integrating mechanical design, electronics,
sensing, and control software. This work involved applying control theory and state-based
autonomy under imperfect sensing, nonlinear dynamics, and hardware constraints. Iterative
testing and validation were central to achieving reliable real-world performance. Alongside
this work, I’ve served as a teaching assistant, supporting multidisciplinary teams through
the design and implementation process.
What I'm Looking For
I’m looking to work in roles focused on robotics, autonomy, and control systems,
where I can contribute to the design and deployment of real-world systems. I’m particularly
interested in environments that value hands-on development, system integration, and iterative testing.
I enjoy roles where engineering decisions are informed by both modeling and practical validation.
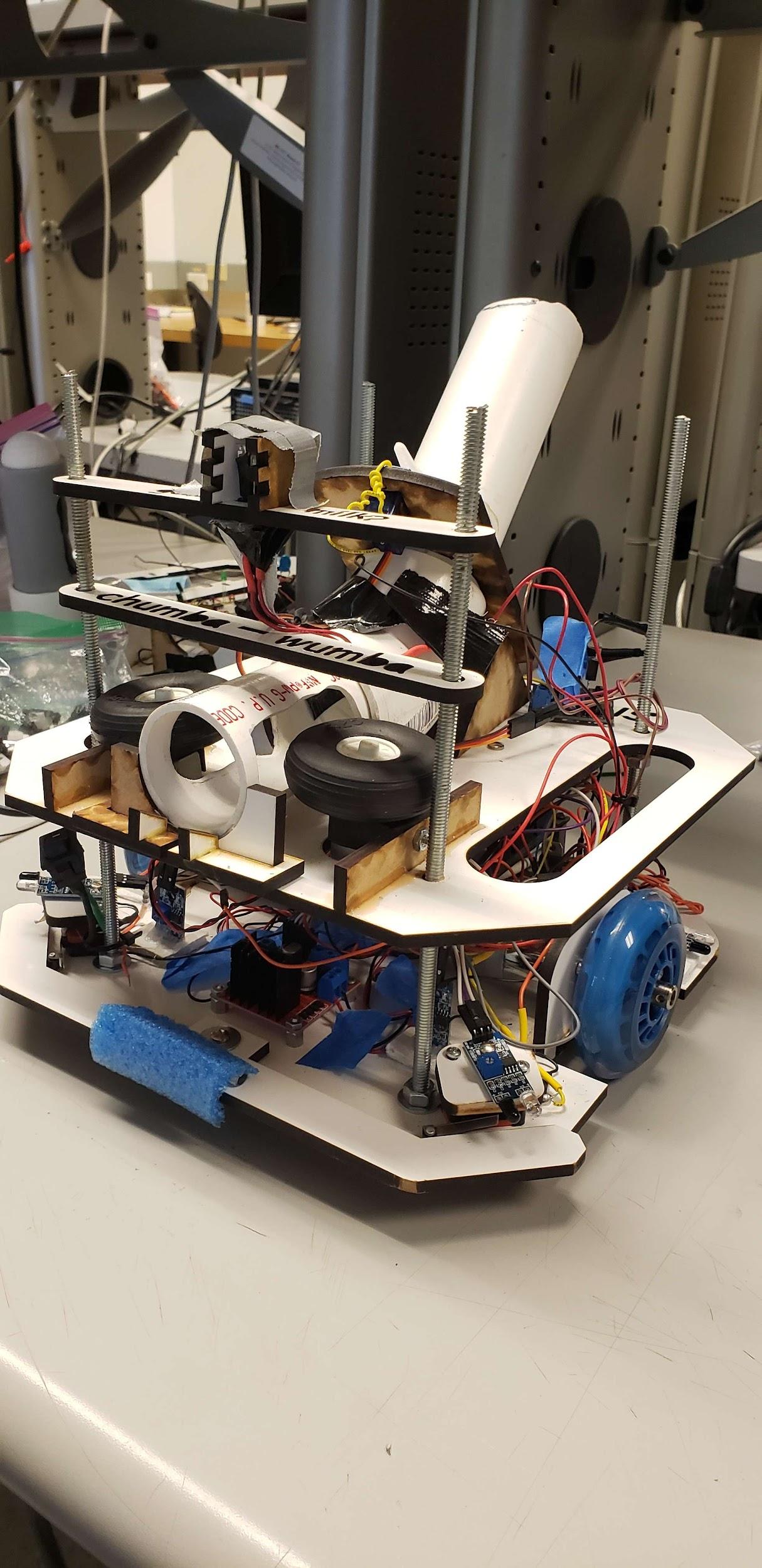
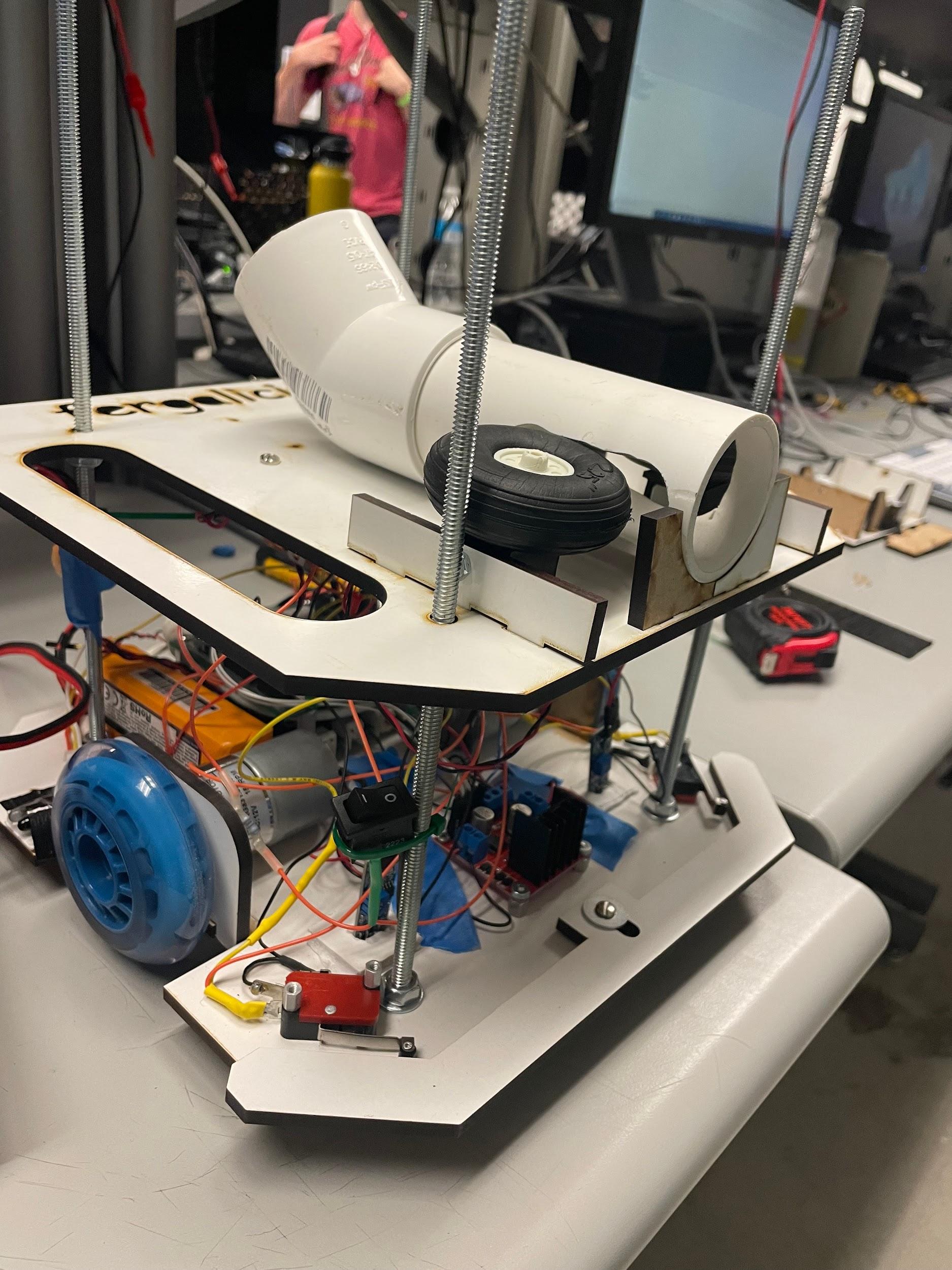
Mechatronics
IR beacon detector enabling goal localization
Stacked MDF chassis for modular and rapid iteration
Flywheel shooting mechanism driven by high-RPM DC motors
Front sensor array for wall following and tape detection
Hierarchical state machine managing navigation and recovery
‹
›
Autonomous Testing
This project involved designing and building a fully autonomous robot for the
ECE 118 “Slug World Cup,” a soccer-inspired competition where robots had to
navigate a 4′×8′ field, locate a goal, avoid obstacles, and score points without
human intervention.
I worked on the mechanical design, electrical systems, and control software, with
a particular focus on sensor integration and system reliability. The robot used
a custom 2 kHz IR beacon detector to localize the goal, IR sensors for wall
following and tape detection, and a flywheel-based shooting mechanism driven by
high-RPM DC motors.
Mechanically, the design emphasized simplicity and rapid iteration using stacked
MDF plates, modular mounts, and tolerance-driven adjustments. On the software
side, a hierarchical state machine handled navigation, shooting, reloading, and
collision recovery.
The final system reliably navigated, aimed, and scored consistently, reinforcing
the importance of tight hardware–software integration.
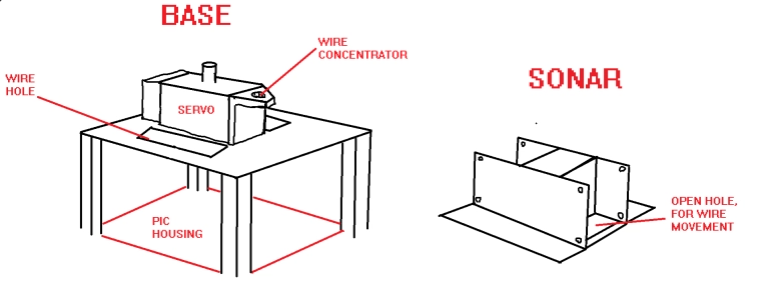
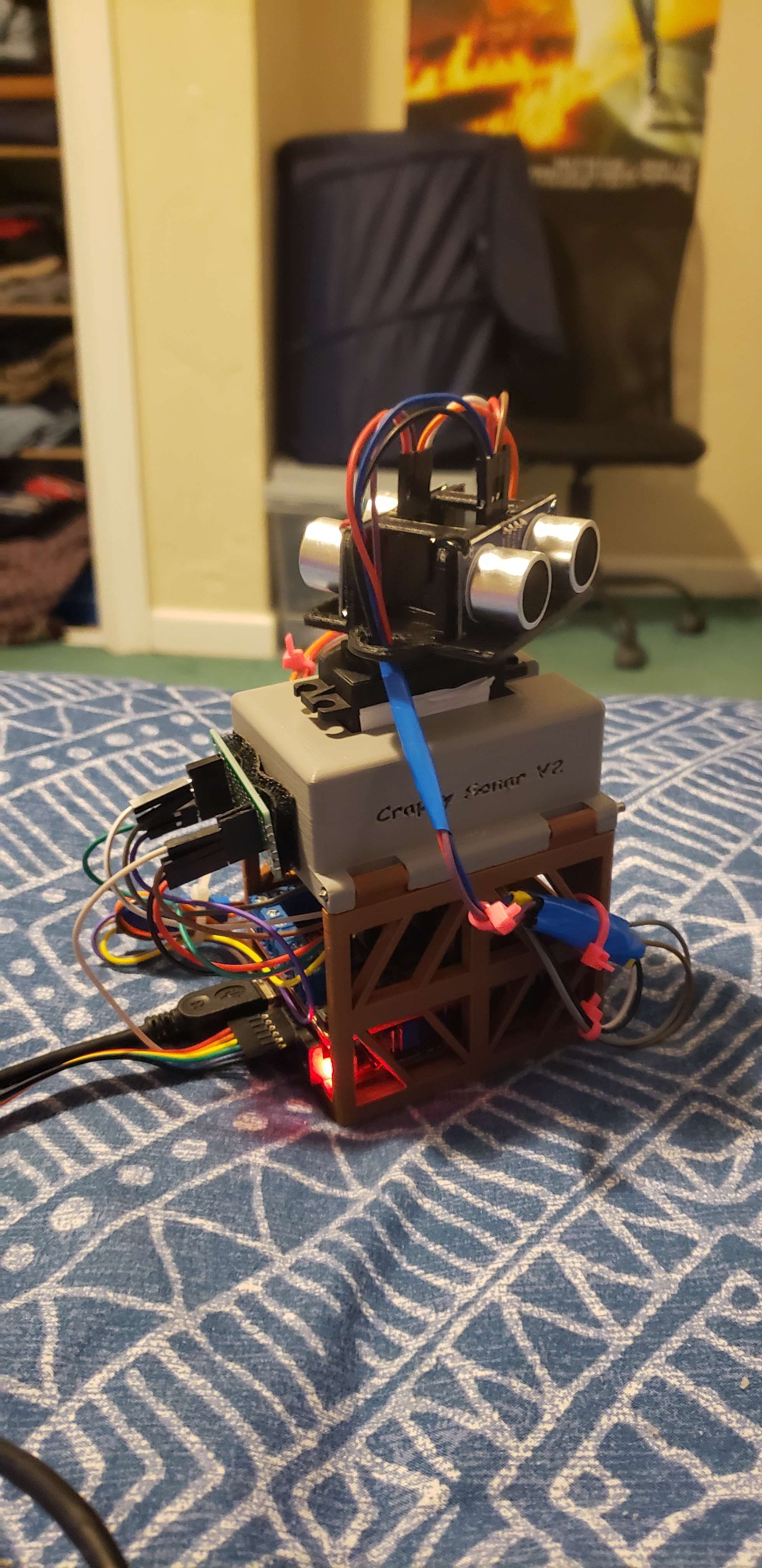
Ultrasonic Scanner
Concept
This project focused on the design and implementation of a compact, rotating ultrasonic sonar
system capable of mapping nearby obstacles in real time. The goal was to build a low-cost
sensing platform that could reliably estimate distance and angular position using minimal
hardware and computational resources.
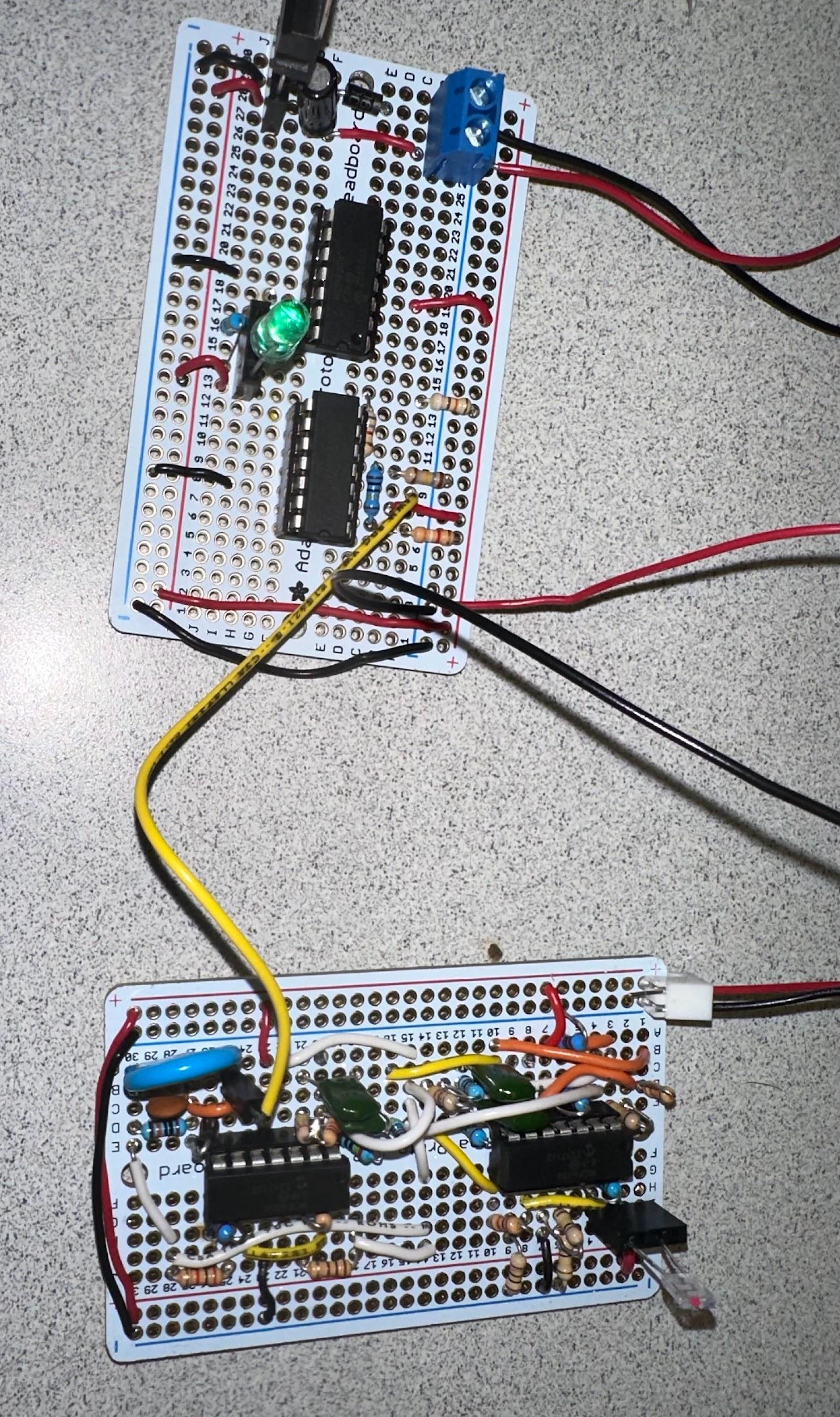
System Design
I developed the embedded firmware on a PIC32 microcontroller to coordinate servo motion
and ultrasonic time-of-flight measurements. Sensor readings were synchronized with servo
position to generate a 360° sweep of the environment, producing a real-time polar map of
nearby obstacles.
To improve angular accuracy, distance measurements were taken only while the servo was
stationary, preventing motion-induced timing errors. A custom ultrasonic sensing library
was implemented using timer-based interrupts to measure echo return times, achieving
centimeter-level accuracy within a twelve-foot range.
Servo motion was calibrated through careful PWM characterization, resolving frequency
mismatches and establishing a repeatable duty-cycle-to-angle mapping. Lightweight
signal filtering using rolling-window averaging was applied to reduce noise while
maintaining scan responsiveness.
The final system produced stable, repeatable obstacle maps and reinforced the importance
of precise timing, synchronization, and state-based control in embedded sensing systems.
UAV Autopilot
This project focused on developing a fixed-wing UAV dynamics model to support controller
design and simulation-based testing in a Python environment. The goal was to build a
modeling framework that balanced physical fidelity with computational simplicity, enabling
rapid iteration on control strategies.
I was responsible for the vehicle dynamics modeling, aerodynamic force and moment computation,
and integration of wind and control inputs into a full six-degree-of-freedom simulation.
The model used a linearized aerodynamic framework with stability derivatives, blended with
a nonlinear post-stall lift model to maintain realistic behavior at high angles of attack.
Forces and moments were computed in the body frame and integrated through a continuous
equations-of-motion update loop. Particular attention was given to environmental effects,
including steady wind, gusts, and Dryden turbulence, to evaluate controller robustness under
non-ideal operating conditions.
This work reinforced the importance of modeling assumptions, validation, and disturbance
handling when transitioning from theoretical controller design to systems intended for
real-world operation.
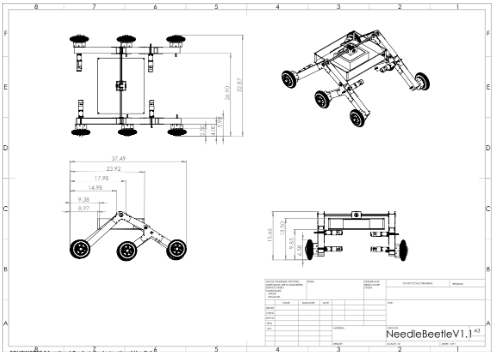
Needle Beetle
Design
‹
›
Capstone Overview
UCSC Santa Cruz requires all Robotics Engineering students to complete a
year-long capstone project synthesizing the concepts and technical skills
developed throughout the degree. The objective is to design, build, and
validate a functional prototype by the end of the academic year.
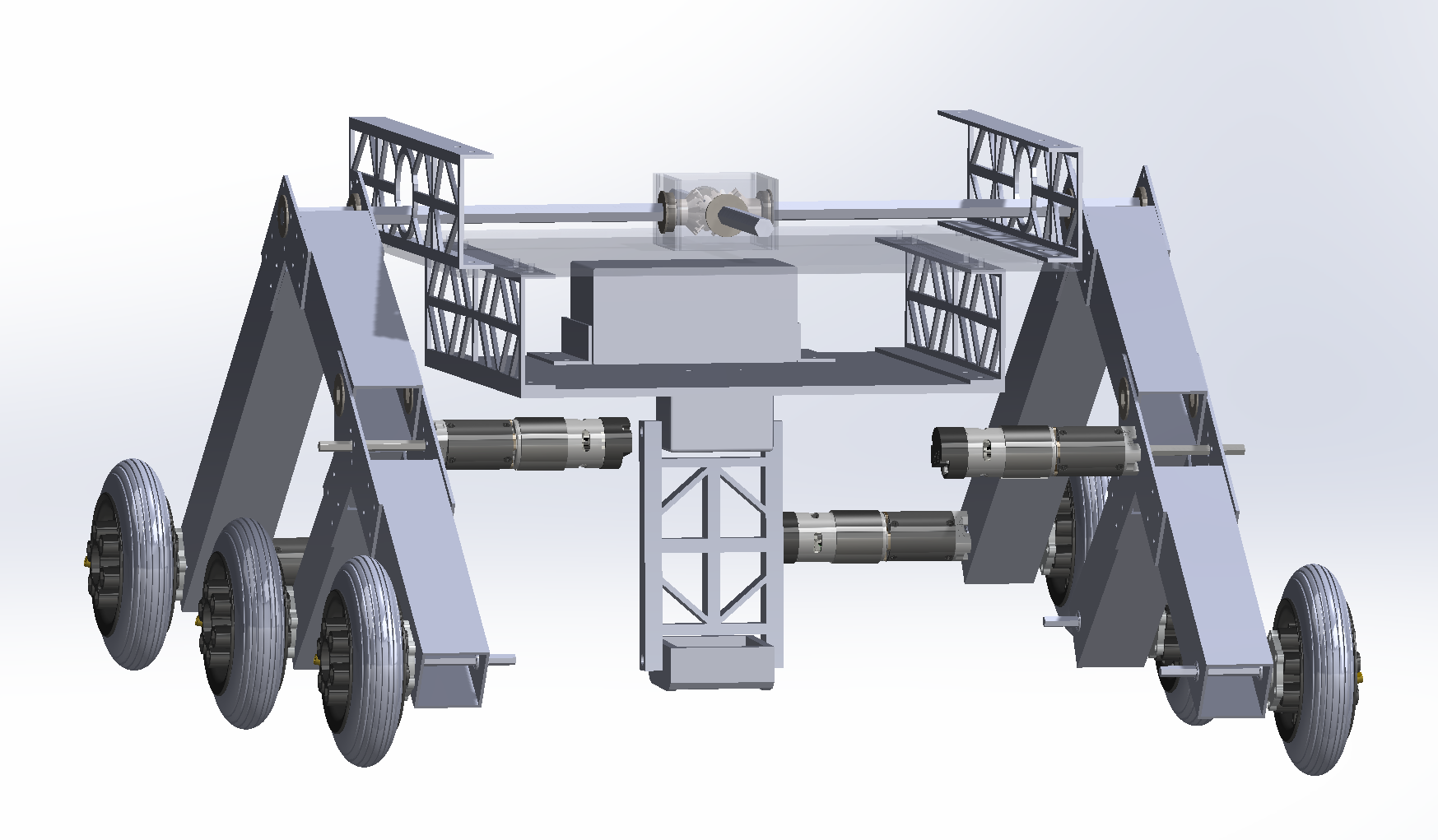
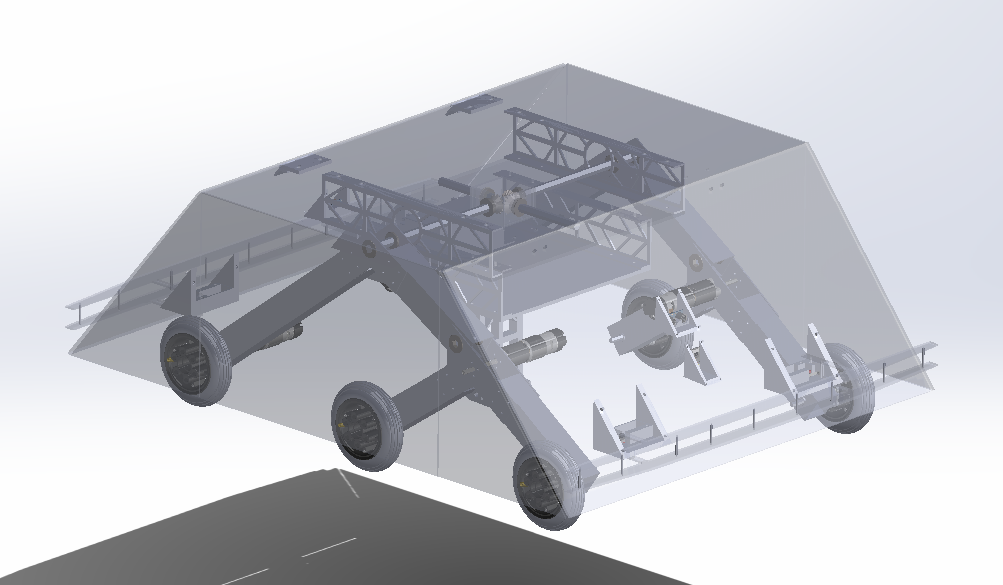
For my capstone, my team and I developed Needle Beetle —
an autonomous rover designed to address the safety risk posed by hypodermic
needles scattered across public beaches. These needles present serious
health hazards, and our system reduces the need for direct human interaction
by detecting and mapping needles buried beneath loose sand.
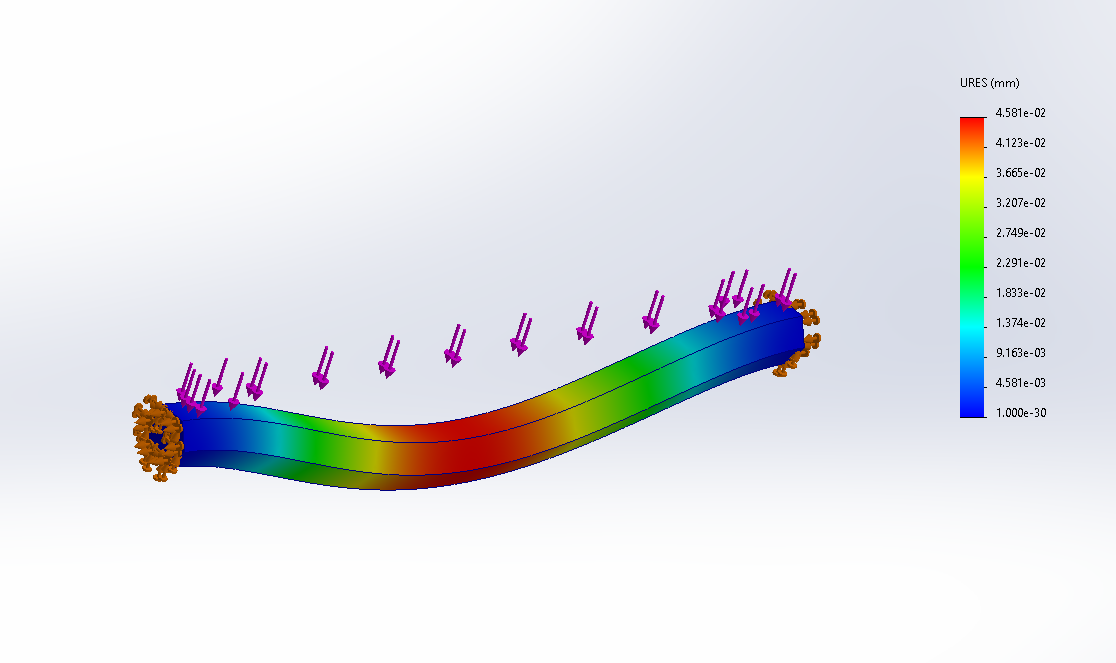
Mechanical Design & Validation
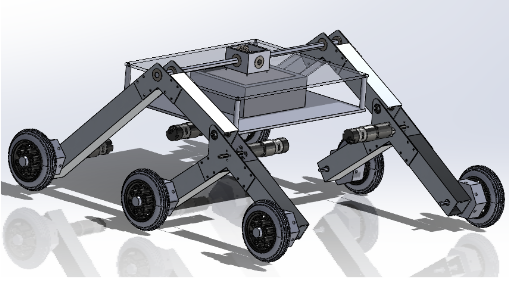
I designed and iterated on a rocker-bogie rover chassis in
SolidWorks, adapting space-rover suspension principles for operation in
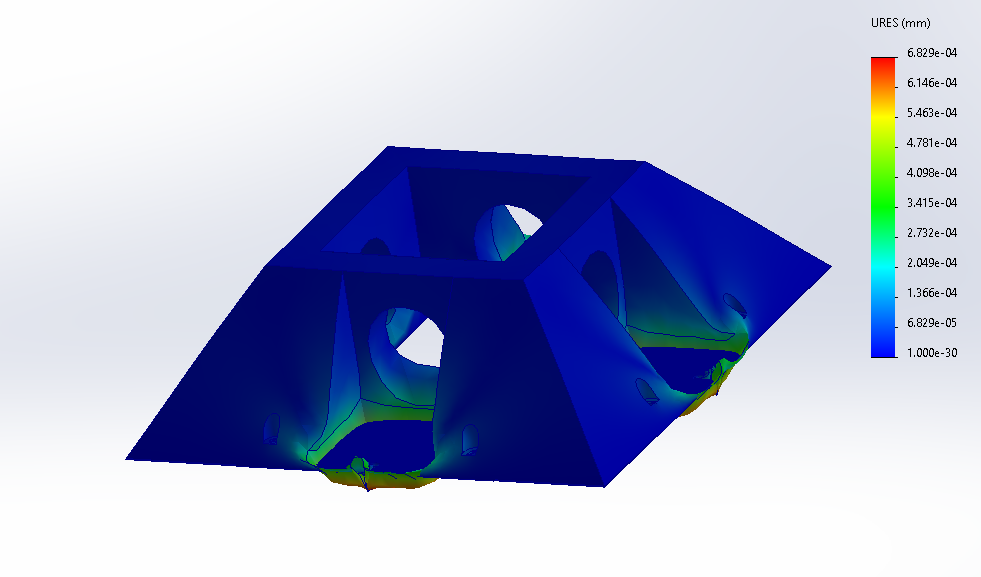
loose, shifting terrain. Structural members were validated using a
combination of hand calculations and SolidWorks simulations to ensure the
system could safely support more than 2× the expected payload.
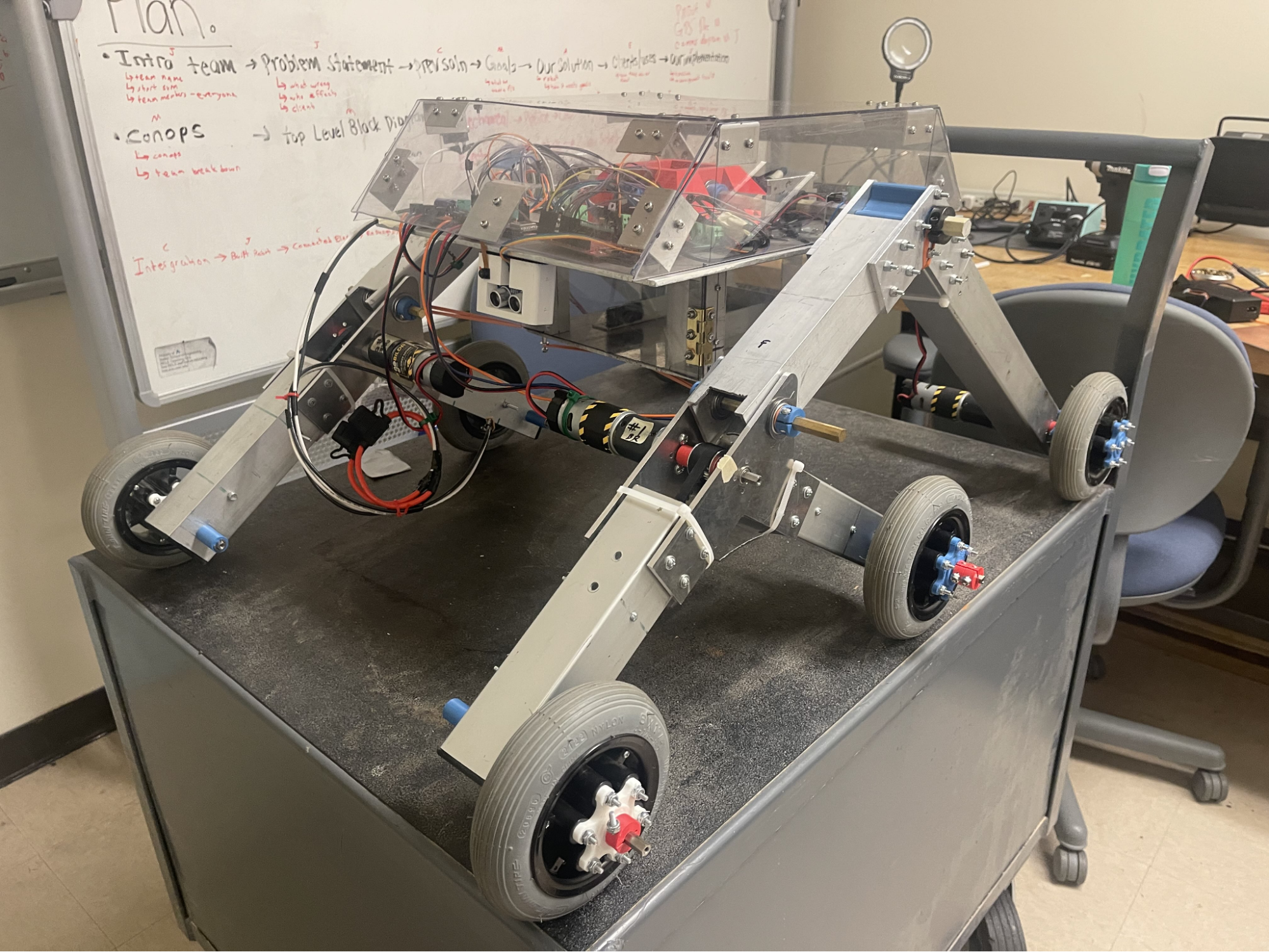
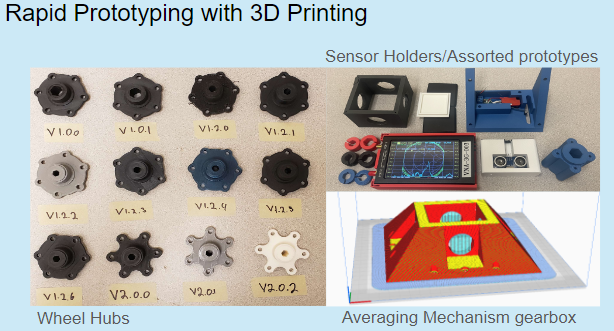
Materials and manufacturing methods — including machined aluminum,
polycarbonate panels, and high-strength 3D-printed components — were selected
to balance durability, weight, and rapid iteration. A custom differential
gearbox was designed and experimentally validated through sustained real-world
testing prior to full system integration.
Payload layout and center-of-gravity placement were refined to improve
stability, enabling smooth traversal over uneven terrain without relying on
active suspension control. These design decisions resulted in a platform
capable of consistent operation in loose, uneven beach environments.